miro
Cargo
Functional Description
1. Overview
miro Cargo is a powerful and flexible GNSS tracking device that integrates a multi-standard GPS receiver with an accelerometer and LoRaWAN® connectivity into one compact device. Optionally, a temperature sensor, humidity sensor and barometer can be added. The IP67-rated housing with different mounting options protects the device at operation in harsh industrial environments. The device firmware allows for configuration to a specific use case to optimize performance and battery lifetime.
If you just received your first miro Cargo device, please visit our Quick Start Guide to get started.
2. GPS fixes
A miro Cargo tracker acquires GPS fixes and transmits them to a LoRaWAN® network server. If the device is steady, GPS fixes are triggered on a regular interval (usually multiple hours). On the other hand, if the miro Cargo is moving, acceleration events trigger GPS fixes at a different rate (usually multiple mintues). The steady and moving interval times are both configurable. To configure the moving interval, the AT+GPSHOLD command is used and to configure the steady interval AT+GPSCYC is used. For more information about these commands, please refer to the Configuration documentation page.
The steady interval is used whenever the miro Cargo is not moving to save battery. As soon as an accelerometer event is triggered a GPS fix acquisition is started immediately. Further accelerometer events will be ignored until the moving interval time elapses. However, a flag will be set in this case, such that the next GPS fix acquisition will start immediately after moving interval time elapses.
If a GPS fix is acquired, a location message will be transmitted to the LoRaWAN® network server. The payload format of the location message is described here. If the payload of the location message is zero, no GPS fix could be acquired. This happens mostly because the miro Cargo has no clear view of the sky, for example, if it is inside a building. The GPS reception of the miro Cargo is best if it is placed outdoors and the label is facing the sky as in the picture below.

3. Status messages
On a regular interval, the auxiliary sensors (accelerometer, battery voltage, temperature, humidity, pressure if available) are readout to generate a status message. This payload will also include the current system time, the current unixtime and some information about the last fix. Please refer to the status message payload documentation for more information. The status message interval time is set with the AT+STACYC command. Usually, a status message is sent only a few times per day.
4. Device configuration
A miro Cargo is configurable via LoRaWAN® downlinks. The available commands are:
-
AT+GPSHOLD- moving interval time -
AT+GPSCYC- steady interval time -
AT+STACYC- status message interval time
More information about these commands and the configured default values, see our Configuration documentation page.
5. Data buffer
miro Cargo trackers use LoRaWAN® confirmation to ensure that every message is recevied by the LoRaWAN® network server. If no confirmation is received the messages are buffered on the miro Cargo and transmitted at a later point in time when the LoRaWAN® network is available again.
A miro Cargo is equipped with a FLASH chip which is used to buffer the messages which could not be transmitted. Typically, a 16 MBit FLASH memory is used which allows to store several thousand location and status messages. If no network is available the device tries to transmit the messages every once in a while. As soon as one of the messages is confirmed again, the miro Cargo switches back to normal operation and starts to upload the buffered messages. The buffer is implemented as a FIFO queue which means that the oldest messages are transmitted first.
6. Reset
A miro Cargo can be reset either by sending a LoRaWAN® downlink command or by using a magnet to trigger a reset when the device is in reach. After a reset, the device will start to join the LoRaWAN® network again. The device will not send any messages until it has joined the LoRaWAN® network again.
The LoRaWAN® downlink command to reset the device is ATZ. The magnet reset is triggered by placing a magnet next to the "C" of the miro Cargo logo, see the picture below. The magnet must be placed for at least 8 seconds to trigger a reset. Once the reset was triggered, the miro Cargo will beep 3 times. The LED inside of the housing will be green for 10 seconds and then turn off. After 10 seconds, the miro Cargo tries to join the LoRaWAN® network again using its keys. If it joins successfully, it makes one long beep and the LED is white for 1 second. This only works if the miro Cargo is registered on a LoRaWAN® network server and if a LoRaWAN® gateway is in range.

7. Batteries
A miro Cargo is powered by 2 AA batteries. The device is designed to work with alkaline batteries. The battery lifetime mainly depends on the configured interval times. The longer the interval times, the longer the battery lifetime. The battery lifetime is also influenced by the temperature. The battery lifetime is typically between 1 and 2 months. The current battery voltage is reported with every status message.
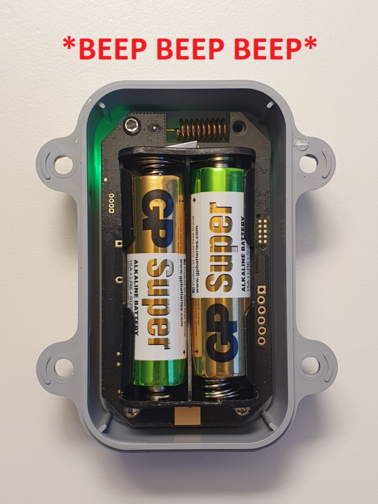
If the miro Cargo runs out of battery, you need to get the miro Cargo out of the field and replace the batteries. Open the housing of the miro Cargo by removing the 4 screws on top (yellow boxes in the picture below) with a standard Phillips screwdriver.

Please replace the batteries with 2 new AA alkaline batteries. Once the new batteries were inseret, the miro Cargo boots which is indicated by 3 short beeps and the LED being green for 10 seconds.
After 10 seconds, the miro Cargo tries to join the LoRaWAN® network again using its keys. If it joins successfully, it makes one long beep and the LED is white for 1 second. This only works if the miro Cargo is registered on a LoRaWAN® network server and if a LoRaWAN® gateway is in range.

| Thighten the screws firmly afterwards to ensure the best possible sealing. |
8. Join behavior
The miro Cargo firmware has a different join behavior for each region. The general idea is that the miro Cargo tries to join the LoRaWAN® network a few times before it goes to sleep and tries again later. This procedure saves battery power and ensures that the miro Cargo is not always trying to join the LoRaWAN® network.
If the miro Cargo is configured for the EU868 or AS923 regions, it tries to join twice before sleeping for 15 minutes. For the US915 region, it tries to join 18 times before sleeping for 30 minutes. For the AU915 region, it tries to join 64 times before sleeping for 1 hour. The join behavior is implemented in the firmware and cannot be changed. It is based on the LoRaWAN® Regional Parameters v1.0.3revA specification.